
标题:ColSLAM: A Versatile Collaborative SLAM System for Mobile Phones Using Point-Line Features and Map Caching
ColSLAM:一种基于点线特征和缓存地图的多用途手机协同SLAM系统
作者:李婉婷(中国人民大学),王永才(中国人民大学),郭泳雨(中国人民大学),王硕(中国人民大学),邵羽(中国人民大学),白雪薇(中国人民大学),蔡旭东(中国人民大学),叶强(达尔豪斯大学),李德英(中国人民大学)
录用会议:ACM MM 2023 (CCF A)
论文概述:在过去几年中,基于手机的增强现实(AR)技术获得了极大关注。在 AR 场景中多人持多部手机工作或游戏时,协作式同步定位和建图(SLAM)是多用户同时实现精确定位和环境感知的关键。然而,当前的多机协同 SLAM ,服务器须求解多机协同的高复杂度图优化问题,造成对每个客户端反馈延迟大,使得系统可扩展性受限;而且在特征稀少的退化环境中会出现定位建图准确性和可靠性差的问题。
为此,本文提出了一种准确、可扩展性好、且稳健的协同SLAM 方法,即基于点-线的协作式 SLAM(ColSLAM)。ColSLAM 的两个创新功能有助于实现令人满意的可扩展性和鲁棒性。
首先,ColSLAM在服务器端为每个客户端建立一个缓存子图(CSG),缓存子图接收客户端传递的关键帧和位姿信息,并查询全局关键帧来检测闭环,快速进行闭环信息辅助的局部图优化,并迅速响应客户端的位姿矫正。通过使用缓存子图技术,每个客户端的局部姿势得以被全局信息及时校正,显著提高了服务器反馈客户端的效率,提升局部定位建图的准确性,并提升整个系统的客户端容量和可扩展性。
其次,ColSLAM引入了更加鲁棒的线特征,并对整个协作式SLAM框架进行了重新设计,以充分利用点、线特征进行位姿计算、回环检测和整体图优化。具体而言,ColSLAM在客户端层面采用了基于点线的VIO技术,同时在服务器上应用基于点线融合的NetVLAD方法来进行闭环检测。这样的技术改进使得多客户端协作SLAM可以在走廊、楼梯等弱纹理环境下得以准确运行。同时在服务器端地图融合中,我们使用了一种名为 PNPL 的增强型几何验证和相对姿态计算方法,以进一步提高系统的鲁棒性和准确性。
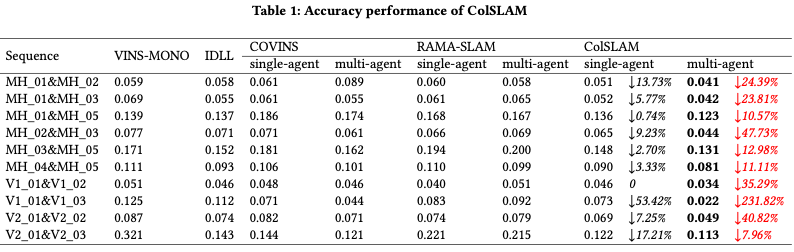
从表1可见,ColSLAM相比现有的四种对比方法的位姿计算误差显著降低。
我们使用公开数据集Euroc并在真实退化环境中对 ColSLAM 进行了评估。结果表明,ColSLAM 在可扩展性和准确性方面都优于当前最先进的方法,包括单机SLAM代表性方法VINS-MONO[1],IDLL[2],和多机协同SLAM的代表性方法COVINS[3],RAMA-SLAM[4]等。同时我们开源了我们的真实的玻璃幕墙实验室走廊环境协作数据集:https://ieee-dataport.org/documents/idls-inlab。
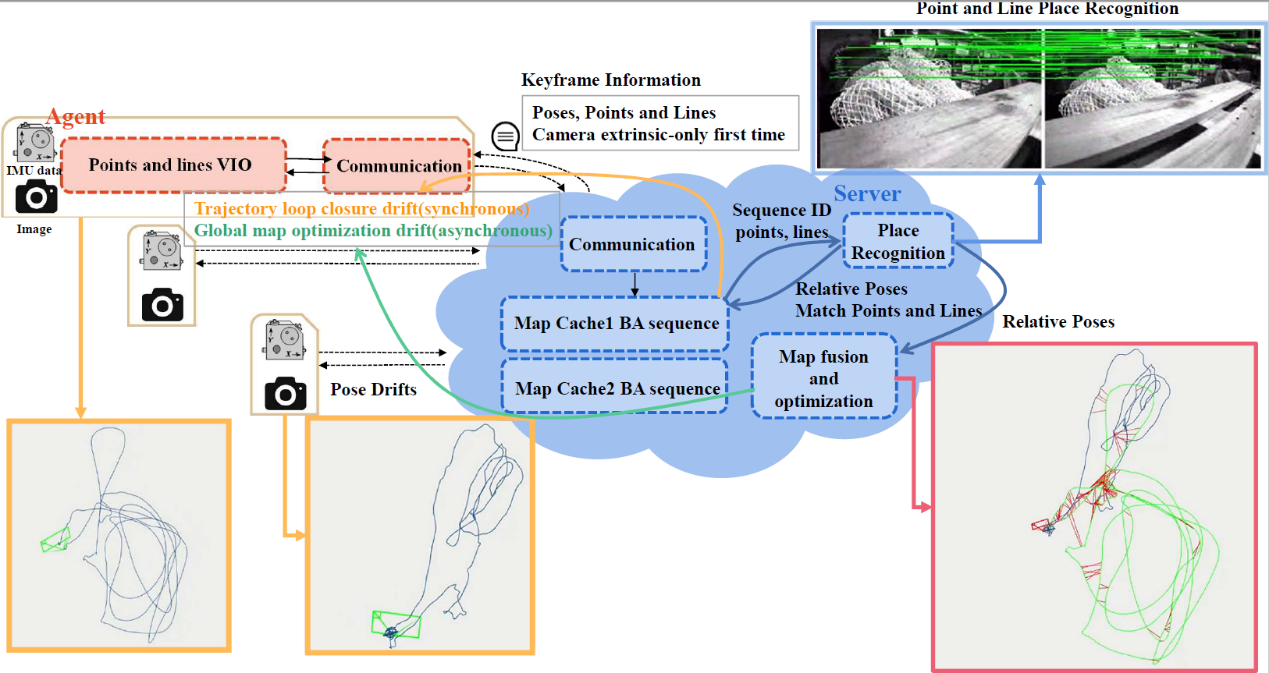
图1. ColSLAM的系统架构图
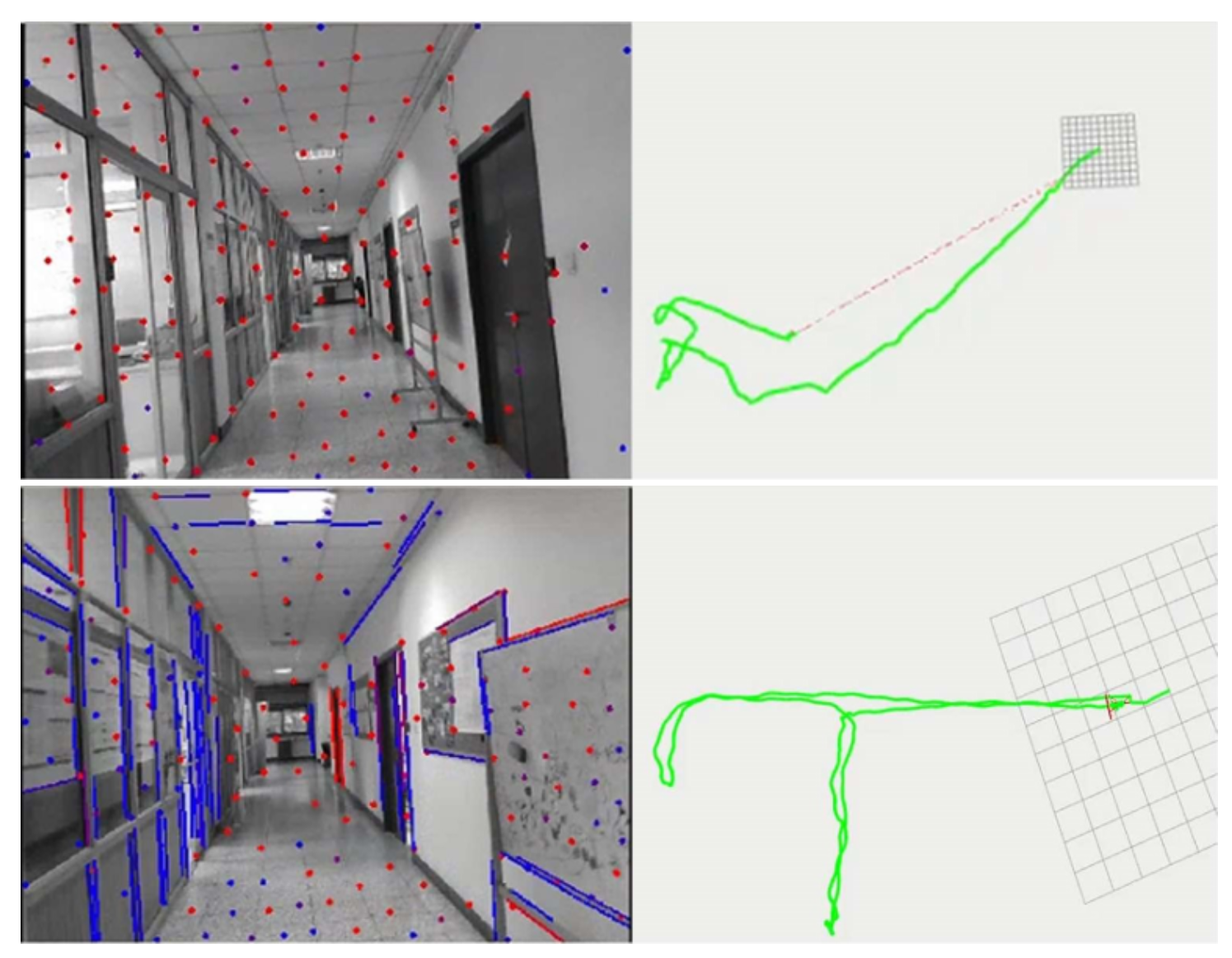
图2. ColSLAM和RAMA-SLAM在特征缺乏的玻璃幕墙走廊中位姿计算结果对比,上面为RAMA-SLAM发生了漂移,ColSLAM使用点线特征准确回到出发位置。
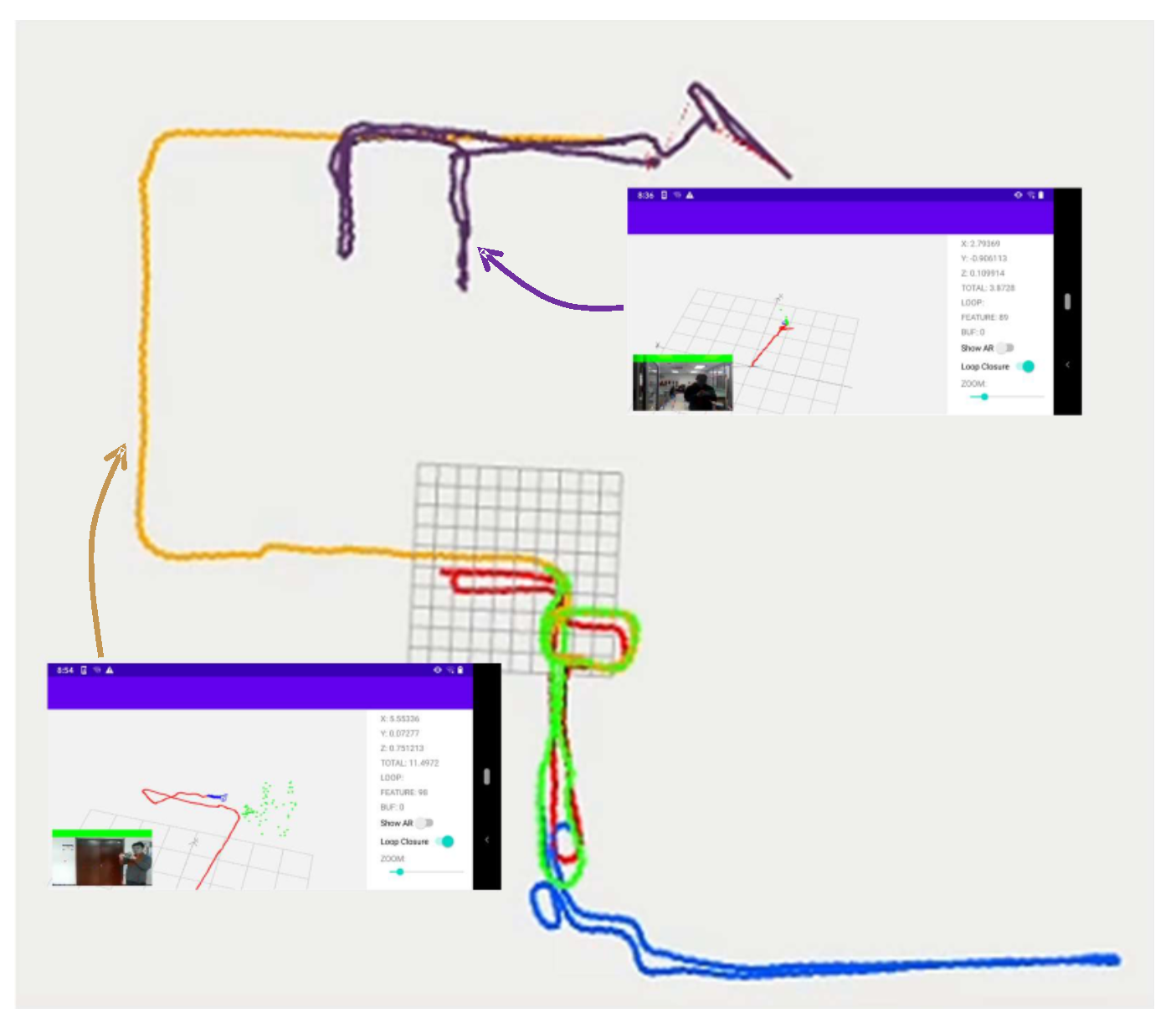
图3. ColSLAM中使用5部手机在玻璃幕墙的实验室走廊环境中同时完成的定位与建图结果
主要作者简介:
李婉婷,第一作者:中国人民大学2019级博士生,协作SLAM,众包感知定位建图,非监督学习普适计算。

王永才,通讯作者:中国人民大学副教授,主要研究方向包括机器感知,协同感知定位建图方法,图优化理论算法与应用。
